NaKole.cz
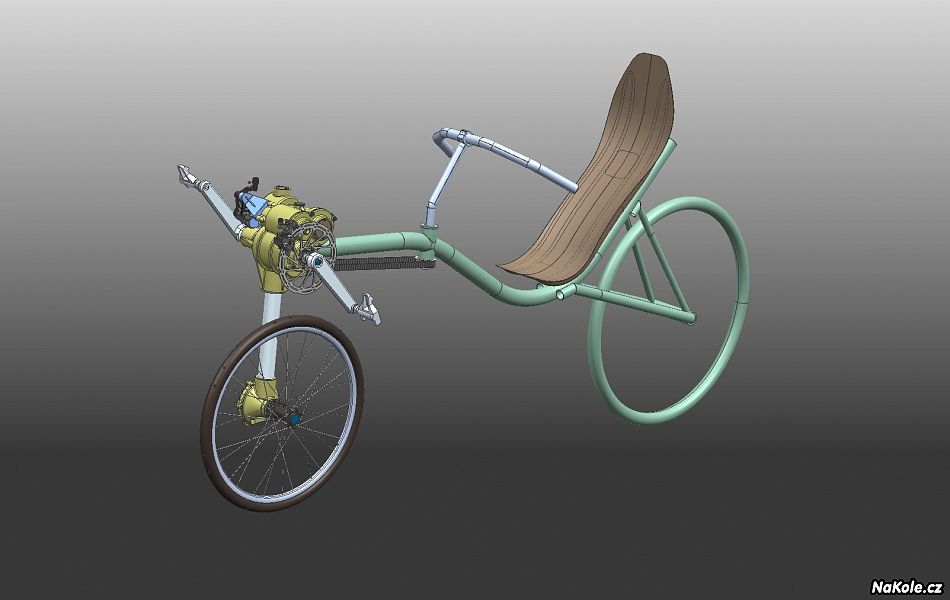
Přední pohon svislou hřídelí.
Dobrý den všem,
v poslední době jsem se nějaký čas věnoval návrhu předního pohonu lehokola. Vznikl tak návrh letmo uchyceného předního kola hnaného svislou hřídelí s osou řízení mimo podélnou rovinu lehokola. Skříň s 6-stupňovou převodovkou je pevně uchycena na rámu a vše je navrženo tak, aby moment trakční síly k ose řízení byl neustále vyrovnáván hnacím momentem svislého hřídele. Proto je i brzda řešena přes hnací hřídel, aby i brzdný moment byl vyrovnán.
Bohužel, nemám žádné výrobní ani prostorové možnosti si takové kolo postavit a vyzkoušet. Kdyby to někdo chtěl zkusit, ozvěte se.


Nejlépe hodnocené
-
Re: Přední pohon svislou hřídelí.
Výrobní možnosti na tohle taky nemám, ale vypadá to velice zajímavě.
Nevím, jestli je účelem tohohle vlákna jenom najít výrobce, nebo i sbírat názory a nápady. Kdyžtak jich můžu pár napsat.Datum: 14.04.2021Autor: NightRiderHodnocení: 0
 0
0
-
Re: Přední pohon svislou hřídelí.
Škoda že nepostavíš napřed řetězový FWD, je to mnohem jednodušší, účinější, lehčí, a lehokolo pak rychlejší.
Potom by jsi zjistil že problémy FWD jsou: absence pružení, ztráta adheze, momenty do řízení, atd.
Ale jinak krásná klikací práce, až tedy na ten Q faktor klik, a řízení - jediné řízení které funguje správně u jednostopého stroje, je přímé - a to zvlášťe u FWD.
;)Datum: 14.04.2021Autor: singleHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
Postupně:
- cílem není jen najít někoho, kdo by se do toho pustil, ale také vyvolat diskuzi
- ten ozubený řemen mi tam nějak pasuje
- jistě, převodovka bude mít určitě větší ztráty, než řetěz
- všechny řetězové FWD, které jsem viděl, mají tu nevýhodu, že síla do pedálu se přenáší do řízení (pokud jsou pedály na otočné části) a v zatáčkách moc nejde šlapat, nebo se kroutí řetěz (pokud jsou pedály na rámu)
- momenty do řízení tady skoro žádné nejsou, je to navržené tak, že momenty jsou eliminované
- váha bude nevýhodou, počítám tak 6-8 kg navíc
-Datum: 15.04.2021Autor: JaVrHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
6 až 8 kg navíc, tak by tomu asi slušel ještě tlumič řízení (pokud jsem ho nepřehlídnul)
Datum: 15.04.2021Autor: rondaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
... a furtošlap lineárního perigea ...
Datum: 15.04.2021Autor: AVHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ty to asi nebudeš pamatovat, ale z parního stroje pochází pouze furtošlap funebrálního perigea. Na tom musím bazírovat ...
Datum: 15.04.2021Autor: madmaxHodnocení: 0 0
-
-
-
Re: Přední pohon svislou hřídelí.
Tak jo, pár náhodných postřehů:
- Momenty od šlapání a brždění eliminované nejsou. Nevznikají v převodech (to máš ošetřené dobře), ale tím, že kolo je vyložené bokem od osy zatáčení. Aby byl moment nulový, musela by hřídel mířit šikmo, aby její osa protínala silnici někde na spojnici bodů, ve kterých se jí dotýkají obě kola. Na druhou stranu je možné, že ten moment bude tak malý, že nebude vadit.
- Ozubený řemen trochu pruží, vyosené přední kolo při přejetí každého kamínku generuje drobný moment a když se správně sejdou frekvence, začne to rezonovat. Rozkmitaný předek jsem jednou zažil, skončilo to pádem a nešlo s tím vůbec nic dělat. Táhlo by bylo spolehlivější. Úplně nejlepší by samozřejmě bylo položit osu řízení víc našikmo a řidítka udělat přímá. Zkušenosti s jakýmkoli nepřímým řízením u předního náhonu jsou obecně dost špatné.
- Nevím, jestli bych chtěl mít na místě převodníku rozžhavený brzdový kotouč. "Cyklistické tetování" se umyje, cejch ne. Zachycené nohavice nebo tkaničky by taky byly průšvih, protože nestačí opatrně šlápnout dozadu, kotouč se točí pořád. A jestli se zasekne, zasekne se i přední kolo a letím. To samé platí, jestli se zasekne nebo poškodí kterákoli součástka v celém převodovém řetězci. V zájmu bezpečnosti bych brzdu přesunul na náboj kola a pod poslední ozubené kolo dal volnoběžku.
- Z obrázků se těžko odhaduje geometrie. Na první pohled to vypadá, že je "vidlice" svislá a tedy nulový závlek (to by moc stabilní nebylo), ale možná to jenom nevidím.
- Trakce do kopce bude trochu horší, ale na silnici to nebude problém, stejně uspořádaná kola existují a fungují (např. Bevo bike).
- 6 převodů je podle mého názoru málo, na skládačce mi sotva stačí 8 a lehokola potřebují podstatně víc: s kopce jsou rychlejší, do kopce pomalejší a potřebují plynulé šlapání vyšší kadencí, jinak nejde udržet rovnováha. Jaký procentuální rozsah ta převodovka má?Datum: 15.04.2021Autor: NightRiderHodnocení: +5 0
-
Re: Přední pohon svislou hřídelí.
Momenty do řízení máš dané už jen tím že když jedeš doprava, vyvoláš předvlek, a když doleva tak závlek.
Doporučuji ti předělat osu hlavy do centrální roviny, a zakomponovat bezpřírubový Rohloff s řemenem.
Tím bys mohl dostat normální šířku Q.
Na FWD je zábavná jeho stabilita v rychlostech, jeho zrychlení, a malé odpory v pohonu oproti RWD.
Vlastnit stroj na kterém můžeš na rovince držet 40ku vlastní silou, po několik hodin, je malý zázrak - pokud tohle FWD nesplňuje, postrádá smysl ho dělat - jsou účinější řešení.
A pořád to je jen FWD jednostopé...Datum: 17.04.2021Autor: singleHodnocení: +2 0
-
-
Re: Přední pohon svislou hřídelí.
Nemáš "žádné výrobní ani prostorové možnosti", takže kolik peněz jsi ochoten (jako investor) do stavby dát?
Vycházej z ceny AZUB-u, zvýšené cca o 25 - 50%Datum: 15.04.2021Autor: AVHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
To přitlač a hodně. Tu složitou kredenc by asi nedlabal z jednoho kusu, takže jen model pro slévárnu by přišel na slušnej ranec. Pak odlití, obrobení, střeva.
Datum: 15.04.2021Autor: rondaHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
Skříň by zřejmě šla udělat jako
A: ocelová svařovaná, obrobená
B: 2x Alu víko+ mezi to Alu profil.
Pokud to spojíš přez osazení těch čel, je to tuhé.
Na pravé víko nabastlit konzoly pro svislý hřídel.
+ průchody svislého hřídele.
C: odlitek metodou ztraceného modelu. + obrobení
Model pro odlitek lze vytisknout na 3d tisku, ovšem nevím jak s materiálem, vypalování slévárenských "kompozitních" písků lze zjistit v slévárně
Tak jako tak, pokud to nebude fuška, jen horní skříň bude cca 25.
Ta dvoudílná dolní jako CNC by mohla být za 10.
ceny samozřejmě bez hřídelů a převodů.Datum: 15.04.2021Autor: cibiHodnocení: +2 0
-
Re: Přední pohon svislou hřídelí.
Variantu A aby ale posadil na listová péra :-)
Datum: 15.04.2021Autor: rondaHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
ehm, podívej se na reduktor z Junkersu F13
(doufám že se nepletu)
V místě ložisk stěna tuším 4mm, jinak 1.5Datum: 15.04.2021Autor: cibiHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
No však. I z milimetru by to ze železa bylo pěkný těžítko.
Jako prototyp by to na ověření nefunkčnosti určitě stačilo. Běžně jezdit bych tím ale nechtěl. Toho materiálu je tam podle obrázků hodně.Datum: 15.04.2021Autor: rondaHodnocení: +2 0
-
Re: Přední pohon svislou hřídelí.
Diplomovka snese mnohé.
( i ta moje nepatří k věcem které by snesly hlubší zkoumání... byť jsem neopisoval.)
Tady autor "jel od nuly" a zamýšlel se, jak vyřešit neduhy FWD.
Přidal jiné (cena, Q faktor, kotouč u pedálu, hmotnost)
ale neumím posoudit, zda tam není nějaký důležitý nápad.Datum: 15.04.2021Autor: cibiHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Zajímavý by byl (hodně zjednodušeně) "karbonový" kardan a lehká převodovka v karbonové skříni.
Ten dominující "kráječ salámu" je ale docela efektní.Datum: 15.04.2021Autor: rondaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Já bych "hlasoval" pro řetěz a Rohloff - mezi ně dát homokinetický kloub
Ona ta kuželová kola (neměla by mít přímé zuby) by nebyla za "hubičku"Datum: 15.04.2021Autor: AVHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Jen pro zajímavost- myslíš , že by jsi kuželová kola s přímým ozubením "cítil" v záběru?
Datum: 15.04.2021Autor: cibiHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Asi by záleželo na velikosti zubů a kvalitě výroby - Rohlík je přímýho ozubení plnej a zjevně dobrý...
Datum: 15.04.2021Autor: SodomaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Rohloff taky dost nepříjemně vrčí..
Datum: 19.04.2021Autor: PavelŠHodnocení: 0 0
-
-
-
-
-
-
-
-
-
-
-
-
Re: Přední pohon svislou hřídelí.
ceny např kuželových kol lze brát zde:
https://www.mateza.cz/e-shop/prevodovky/ozubena...
mají i klasická kola.
K tomu počítej ještě obrobení děr a čel, (kola mají jen "polotovarovou" díru a nemají drážku pro pero.Datum: 15.04.2021Autor: cibiHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ještě něco o samotném principu.
Trakční a brzdová síla na obvodu kola v místě styku s vozovkou vytvářejí k ose řízení momenty, které jsou, při určitém konstrukčním nastavení, zcela (teoreticky) vyrovnány stejně velkými monety opačného směru ve svislé hřídeli. To platí jen na vodorovné silnici a pokud je osa řízení kolmá, aby tíhová síla navytvářela další moment. Při jízde z kopce nebo do kopce tam jakýsi moment bude, ale nebude velký.
Větší problém vidím ve stabilitě řízení pří vyšších rychlostech, protože tam není klasický závlek. Bod styku kola s vozovkou je vlevo od průsečíku osy řízení, takže při vychýlení řízení doprava vzniká stabilizační efekt, jako při klasickém závleku, ale při vychýlení řízení doleva vznikající síla dál zvětšuje vychýlení řízení, což není dobré. Možná by pomohl už zmíněný tlumič. Tento princip bych chtěl ověřit na jednoduše upraveném normálním kole, ale zatím jsem se k tomu nedostal.
Pokud by se stabilita ukázala jako dostačující, pak bych se klidně s někým podělil o náklady na výrobu celého lehokola.
Převody (20" kolo):
1 ... 2,8 m/ot pedálů
6 ... 7,5
Skříň by šla kromě odlitku a svařence také opracovat z kusu. Vyšlo by to z kulatiny D250.Datum: 15.04.2021Autor: JaVrHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Promiň, ale s tím obráběním (horní) skříně z 1 kusu bych si dovolil nesouhlasit.
Frézy bývají vyložené max 3-4xD
Hloubku obrábění tipuji z obrázku na 200+ mm?
Obvykle se u nás ve firmě používají frézy do 25mm.
Frézař Tě bude honit po dílně...
Taková skříň by Tě vyšla velmi hrubým odhadem 50 tisíc. (opravdu odhad) Datum: 15.04.2021Autor: cibiHodnocení: +1 0
Datum: 15.04.2021Autor: cibiHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Popravdě čím víc na to koukám, tím méně životaschopné řešení se mi to zdá.
Vynesení roviny kola z osy zatáčení je nešťasné snad ze všech stran. Každý hrb bude do řízení kopat. Naklonění kola bude v řízení znát taky a je až neuvěřitelné, jak často se jede po bočně skloneném podkladu. Když si do toho přihodím pružnost řemenu (mimochodem nevidím napínák) tak se obávám, že to po půl kilometru hodíš do škarpy jen ze zoufalství z neustálého zápasu s řidítkama. Nerozumím úplně jak máš vymyšlenou eliminaci momentů do řízení generovanou šlapáním, opravdu nebude znát jak moc se na šlapkách člověk vzpírá, či jak moc brzdí? Co když pojede jen setrvačností?
Stran stability, uvědom si, že jednu z nejtěžší součásti kola jsi umístil přímo nad přední kolo do nejvyššího bodu, Jednak je to neodpružená hmota a jednak je vysoko. Zkus si na "klasické" lehokolo do obdobného místa umístit obdobnou hmotnost, nevěřím že to bude pohodlné/praktické.
Slyšel jsem lidi prskat že je těžký Pinion či Rohlík, což je obojí zlomek Tebou předpokládané hmotnosti, s řádově lepšími parametry: měl jsem osmirychlostní Alfinu s rozsahem 308% a šla pryč, právě kvůli nedostatečnému rozsahu (a to byla výrazě lehčí). 6-8kg pohonu s šesti rychlostmi a rozsahem 200% nedává smysl snad kromě čistě teoretického projektu či čisté posedlosti kardanem za každou cenu.
Jak zmiňoval NightRider, ten kotouč vedle nohy je sebevražda. Kromě výše uvedených důvodů, mě osobně vyloženě děsí představa, že se mi vedle nohy točí s kolem pevně spojený cirkulárkový kotouč. Tkanička z boty bude to nejlepší, co se ti tam může chytit. Ještě tak možná kdyby to nebyla vylehčená klasika, ale byl plný (bez loukotí), ale i tak.
Ten gynekologický Q-faktor mě taky tahá za oči.
Nevím co je záměrem konstrukce, ale nebylo by snazší (a v konečným důsledku i levnější) vycházet z převodovky na trhu dostupné a hnát standardně zadní kolo za eliminace řetězu ve prospěch kardanu? hračka by to byla taky zajímavá a technicky proveditelnější řekl bychDatum: 15.04.2021Autor: SodomaHodnocení: +4 0
-
-
Re: Přední pohon svislou hřídelí.
Zdá se mi to, nebo je ta levá šlapka na třetím obrázku (pravá z pohledu jezdce) dál od svislé osy stroje než ta druhá? (Rychlá zkouška přes Malování)
 Datum: 15.04.2021Autor: SodomaHodnocení: 0 0
Datum: 15.04.2021Autor: SodomaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Bezpečnostní opatření (aby noha byla dál od brzdové šajby)
Datum: 15.04.2021Autor: AVHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Nechytejte se kdejakého detailu, je to prvotní návrh. V této chvíli jde o posouzení základního principu, cenu, hmotnost, Q-faktor ajn. zatím nechme stranou. Já také nejsem specialista na ozubené převody, kdyby se toho chytla specializovaná firma, určitě by to dokázala udělat líp.
Přikládám pár obrázků na vysvětlení principu eliminace momentů.
Osa řízení by nebyla přesně kolmá, ale byla by o 1-2° skloněná, aby kompenzovala valivé odpory. Sodoma má pravdu, že nerovnosti budou kopat. To mě zatím nenapadlo.
Pro ověření principu mám v úmyslu vzít staré klasické kolo se svařovaným rámem, uříznout hlavu řízení, přes kus plechu ho navařit o 80 mm vedle, do hlavy strčit původní vidlici a přes prodlouženou osu umístit kolo mimo vidlici. Uvidíme, jestli se s tím bude dát jezdit.
 Datum: 16.04.2021Autor: JaVrHodnocení: 0 -1
Datum: 16.04.2021Autor: JaVrHodnocení: 0 -1
-
Re: Přední pohon svislou hřídelí.
Nejsem technik, ale nějak si nedovedu představit nějaké silové prudké brzdění z větší rychlosti přes tu hřídel a ozubená kola.
Možná to může fungovat, ale dost bych se toho bát a nevěřil tomu.Datum: 16.04.2021Autor: Lelek-nakoleHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Hele to fakt nebude fungovat.
Nemůžeš naladit geometrii rámu tak, aby eliminovala valivé odpory a vyvážila tak nestabilní vedení předního kola. Valivé odpory se v čase mění v závislosti na opotřebení, čistotě a nejspíš i kvalitě všech zúčastněných prvků.
Proto jsem se ptal co má být vlastně cílem. Jestli mentální cvičení tak OK.
Jestli seriózní návrh a následná výroba, zanedbávat věci jako hmotnost a Q faktor není dobrý nápad.
Pokud jde o to vyvažování momentů, ber v potaz, že KAŽDÉ ozubení má nějaké výrobní vůle (které s časem rostou díky opotřebení) a při každém přechodu mezi záběrem a bržděním se ty vůle budou přeskládávat na druhou stranu což bude způsobovat prodlevu v tom vyvážení (i za předpokladu že to jinak bude fungovat perfektně).
Taky bych rád poukázal na fakt, že převodovka Pinion, která bydlí ve šlapacím středu, navzdory vlastní vestavěné volnoběžce používá další v náboji zadního kola. Právě proto, aby při sjezdu z kopce jezdci vedle nohy nerotoval zbesilý kotouč toužící sežrat všechno co se ho jen dotkne.
Pokud chceš posoudit základní princip, tak můj názor je, že je to jako celek řešení komplikované, náročné na výrobu, údržbu a možná i prvoz, pravděpodobně nepohodlné a potenciálně nebezpečné.
Pravděpodobně to v zásadě řeší jistá omezení kterými trpí "standardní" FWD konstrukce, ale přináší to mnohé další, které jsou, alespoň dle mého soudu, významnější.
Pokud by mým cílem bylo postavit si "kolo co nikdo jiný nemá", pustil bych se jinou cestou.Datum: 16.04.2021Autor: SodomaHodnocení: +7 0
-
Re: Přední pohon svislou hřídelí.
Jo, ta kompenzace by opravdu fungovala. Převodovka drží na pevném rámu, z ní se do řízení žádný moment nedostane. Svislá hřídel se na ose řízení volně otáčí, takže od ní tam taky nic nejde. Takže se celá úloha redukuje na rovnováhu dvou momentů. Jeden je FT*a, druhý je vodorovná složka síly mezi zuby kuželových kol mezi hřídelí a kolem, krát vodorovná vzdálenost od osy řízení k bodu, kde se ty zuby potkávají. Ta se určuje hůř, protože se potkávají úsečkou a ne bodem (a časem se může měnit kvůli opotřebení zubů), ale dá se to vyladit axiálním posunem výpletu. Rovnováha potom závisí jenom na poměru ramen a ten je konstantní, takže šlapání ani brždění se do řízení nepřenese.
Jiná věc jsou momenty od hrbů na silnici, od náklonu, jiné chování v levé a pravé zatáčce atd., jak psali ostatní. Ten pokus s upraveným klasickým kolem je dobrý nápad, jsem zvědavý, jak dopadne.
Mimochodem: Mike Burrows, velký fanda letmých os, postavil spoustu úspěšných kol i tříkolek s asymetrickým zadním kolem: uprostřed ložisko, vlevo kolo a vpravo kazeta. Jestli se ale nemýlím, přední kolo měl vždycky přesně v ose řízení, i když bylo na jednonohé vidlici.Datum: 17.04.2021Autor: NightRiderHodnocení: +2 0
-
Re: Přední pohon svislou hřídelí.
Promiň, ale to přední kolo má osu otáčení vysazenou do strany, co jako na takovém patentu bude fungovat?
Nic.
S tím se ani nerozjedeš.
Doporučuji autorovi, aby udělal simulační analýzu převodu momentu z pedálů na kolo.
Měl to udělat hned a mohli jsme si ušetřit tuhle diskusi...
:(Datum: 17.04.2021Autor: singleHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Btw Burrows sice dělá letmo uložené zadní kolo, ale jeho vysazení do strany absolutně nedává smysl - vše se dá vyřešit geometrií vlastního rámu - to že to Mike neudělal je spíš chyba.
Já jezdil chvíli na FWD lowraceru se zadním kolem mimo osu, a byl to fakt opruz jak to nedrželo směr a padalo to do zatáčky pokaždé jinak.Datum: 17.04.2021Autor: singleHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Já mám takový dojem, že Burrows a někteří jeho napodobovatelé to dělali s úmyslně asymetrickým rámem, takže středové a hlavové složení byly v ose a zadní část byla uhnutá do strany tak, aby bylo v ose i zadní kolo.
Datum: 17.04.2021Autor: AviatikHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Svezl jsem se kdysi dávno v NL na jednom lowraceru co byl myslím od Burrowse. Měl mimo středovou rovinu rámu obě kola, přední bylo mírně vpravo a zadní o větší kus vlevo. Trik byl v tom, že spojnice dotyku těch kol se zemí procházela středovou rovinou rámu zrovna v těžišti jezdce, takže když sis na to sednul a měl rám svisle, nezkoušelo to nikam padat. Zároveň osa řízení protínala zem ve stopě předního kola. Při větších náklonech měl člověk pocit, že cítí drobný rozdíl v chování v pravé vs levé zatáčce, ale musel na to docela myslet, aby si všimnul. Na první pohled totálně křivé kolo, ale jezdilo rovně. Něco jak Rutanův Boomerang, který vypadá šíleně nesymetricky, ale létá symetričtěji než běžný symetrický twin co se mu oba motory točí na stejnou stranu.
Datum: 20.04.2021Autor: JirkaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ono by to taky mohlo jít tak, že zadní kolo nemusí být kolmo, ale může směřovat na hlavové složení. Našel jsem třeba tohle: https://farm2.static.flickr.com/1305/4690981290...
Datum: 20.04.2021Autor: AviatikHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Jako obcházet se dá ledacos, ale není prostě jednodušší postavit ten rám symetricky? Případně mít letmo zavěšená kola v ose stroje? Různé šišatosti se dají kompenzovat různě (třeba Tatry mají kola rozmístěná v kosodélníku) ale musí to mít nějakou přidanou hodnotu jinde, aby to stálo za to...
Datum: 20.04.2021Autor: SodomaHodnocení: +1 0
-
-
-
-
-
Re: Přední pohon svislou hřídelí.
TEORETICKY to sice funguje (kompenzace momentů od šlapání a brždění je v tomto případě teoreticky dobrá), ale je potřeba si uvědomit, že v podstatě KAŽDÁ teorie jakýmsi způsobem abstrahuje. Tedy některé reálné faktory zanedbává. Při aplikaci je ale potřeba se pořádně zamyslet, jestli ty abstrahované faktory nejsou nakonec ty podstatné. Kompenzovat momenty od pohonu a brždění je jedna věc, ale to rozhodně není všechno, co je potřeba od řízeného kola očekávat, jsou situace, kdy se ani nešlape ani nebrzdí a v takovýchto situacích podle mě bude kolo s touto geometrií řízení (závlek/předvlek závislý na otočení řídítek) prakticky nepoužitelné. Odhaduju, že aby to vůbec nějak jelo (třeba samospádem z mírného kopce bez brždění), bude muset pilot svírat řídítka opravdu pevně a být stále ve střehu. Oproti tomu "momenty od šlapání" v případě např. FWD s klasickým krouceným řetězem přes kladku budou zcela v pohodě, protože jsou zcela předvídatelné a člověk si na to velmi rychle zvykne. Toto bych odhadoval, že bude naprosto nevyzpytatelné a celkově mi to přijde jako kravina. Ledaže by se tam zakomponoval za pomoci skenování terénu počítačem řízený inteligentní posilovač řízení :-D
Ale nejsem konstruktér ani technik a pokud máš v úmyslu udělat nějaký testovací prototyp (třeba bez pohonu, ten by podle těch rovnic opravdu neměl nijak zhoršit), jen to toho a zajímalo by mě, do jaké míry jsem se se svým odhadem trefil :-)
Btw. Mám jedno staré kolo s křivým rámem po boračce, přední a zadní kolo kreslí ve sněhu dvě nekřížící se rovné stopy cca 10 cm od sebe a jezdit se na tom dá v pohodě (ne bez držení řídítek), takže vím, že nemusí být všechno úplně symetrické, ale i tak se mi tvůj záměr moc nezdá...Datum: 19.04.2021Autor: PavelŠHodnocení: 0 0
-
-
Re: Přední pohon svislou hřídelí.
Tak jsem to sledoval a napadla mě kontrolní otázka: kolik máš na kterém lehokole najeto?
Datum: 20.04.2021Autor: madmaxHodnocení: +6 0
-
Re: Přední pohon svislou hřídelí.
Nikdy jsem na lehokole neseděl.
Datum: 21.04.2021Autor: JaVrHodnocení: 0 -2
-
Re: Přední pohon svislou hřídelí.
Tohle je ještě dobrý. Horší je, že podobní "géniové", aniž by kdy létali, se cpou do vývoje autopilotů dopravních letadel. A jsou tu už stovky mrtvých (A-320, B-737 MAX ...). Doufám, že se nehodláš ubírat tímto směrem.
Datum: 21.04.2021Autor: madmaxHodnocení: +1 -1
-
Re: Přední pohon svislou hřídelí.
Soused děla do techniky letadel (u konkurenční společnosti) a nechápe jak to u Maxu mohlo projít. Oficiálně se k tomu nesmí vyjadřovat.
Datum: 22.04.2021Autor: Jiri.velmezHodnocení: 0 -1
-
Re: Přední pohon svislou hřídelí.
Prosté: v rámci snížení nákladů, zrychlení procesů a zvýšení zisků neustále optimalizuješ. To znamená zbavuješ se všeho co tě brzdí.
Pokud je ve velení někdo, kdo nepřemýšlí dostatečně dopředu, a to se dneska stává čím dál častěji, dostaneš se do bodu, kdy tě brzdí bezpečnostní postupy. A tak začneš v tichosti omezovat a obcházet i je. Chvilku se nic neděje, ony bývají z návrhu obvykle dost robustní. A tak obcházíš a omezuješ dál. Pořád se nic neděje. V tenhle okamžik už se to začíná zdát logické: nějakej debil navrhl bezpečnostní procedury příliš naddimenzovaný a tebe to stálo prachy, ale jak jsi už dokázal, dá se na to vysrat a svět se točí dál. A tak pokračuješ.
Tady je třeba si uvědomit, že tahle fáze bývá v režii manažerů, akcionářů a vůbec lidí, kteří sčítají čísla v excelu a jediné co vědí s jistotou, že v některých sloupečcích musí být číslo co nejmenší, v některých co největší a mají rozhodovací pravomoc.
A tak se časem dostaneš do situace, kdy už konečně něco praskne. Výtah se utrhne, letadlo havaruje, doplň nehodu dle libosti či zaměření odvětví. A pak se z průseru sundá kapotáž PR a reklamy a nějaký (rámcově) nezávislý technik se podívá na skutečná funkční střeva a nestačí chápat, že to vydrželo fungovat tak dlouho.
V menším či větším měřítku tenhle postup vidím znova a znova kam se podívám, takže bych se MOC divil, kdyby to nebyl i tenhle případ...Datum: 22.04.2021Autor: SodomaHodnocení: +6 0
-
Re: Přední pohon svislou hřídelí.
Je to tak. Jakmile světu začnou vládnout lidé, co umí jen peníze a posuzují všechno jen podle peněz, tak jde všechno ostatní do ... Jeden neumí nerozeznat špinavé peníze, druhému vadí bezpečnostní postupy a normy, třetí se rovnou spřáhne s odvěkým generačním nepřítelem a dělá s ním bussines. No a pak se nestačíme divit.
Datum: 22.04.2021Autor: BrahmaHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
Jo máš pravdu toto (Max) byl zcela určitě ten případ.
Datum: 22.04.2021Autor: Jiri.velmezHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ano, ano... manažer zpravidla ještě netuší, jak bude výrobek vypadat, ale ví přesně, kdy musí být vyvinutý, schválený, vyrobený a expedovaný...
Zažil jsem několikrát dokonce i scénku, kdy manažeři si nahoře malovali podle plánu žížalky a měsíce nebrali v potaz, že dole se na té zakázce ještě nezačalo dělat, protože se dodělává ta, co je půl roku formálně hotová... jak spolehlivé zařízení ve zbývajícím čase vzniklo je jasné - věděli jsme, že je to úplně k ničemu, ale nebyl čas, tak se to poslalo do provozu... :-)Datum: 22.04.2021Autor: JrrHodnocení: +1 0
-
-
-
-
-
Re: Přední pohon svislou hřídelí.
Pokud chcete vylepšit nějaké stávající zařízení, je potřeba být součástí oboru. Pokud ale chcete přijít s něčím novým, co co si klade za cíl posunout stávající nedobrý stav o krok kupředu, je lepší být nezávislý a vařit z čisté vody.
Datum: 22.04.2021Autor: JaVrHodnocení: 0 -1
-
Re: Přední pohon svislou hřídelí.
Ano, firma Glock existuje. Doporučuju nastudovat, jak začala s výrobou zbraní (původně dělala tuším knoflíky, garnyže a podobnou šepleť).
Je tam jeden veledůležitý krok, který jsi zjevně zanedbal...Datum: 22.04.2021Autor: SodomaHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Nějaký nový systém asi nejspíše napadne někoho,kdo nemá s danou věcí nic společného,protože takový člověk není zatížený předsudky co a jak musí fungovat a jak je potřeba aby to bylo zkombinované dohromady. Pak je na příslušných odbornících,aby posoudili,jestli je ten nový nápad použitelný,nebo ne.
Datum: 22.04.2021Autor: DAVID7001Hodnocení: 0 -1
-
Re: Přední pohon svislou hřídelí.
Nojo, ale řízení, které na jednu stranu výchylku brzdí a na druhou stranu přidává je poměrně nestabilní. To se dá vydedukovat i bez zkušeností s cyklistikou. To prostě platí pro každé řízení a to čehokoliv. Dá se to eliminovat chytrým automatickým regulátorem, který bude postavený přesně na řízení této unikátní nestabilní soustavy, ale pak to bude jako moderní stíhací letadla, které bez toho robota už nikdo ve vzduchu neudrží. Prostě přestanou samy létat. Tohle kolo zase nebude samo držet směr jízdy.
Zkušenost je občas svazující. Člověk bez zkušenosti v tom jednom specializovaném oboru může přinést neotřelé nápady. Nesmí se v nich ale dopouštět elementárních chyb.Datum: 22.04.2021Autor: BrahmaHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
Tady u toho nápadu ale nešlo jen o to řízení. Jde o celý ten systém pohonu. Uvést tu věc do použitelného stavu už je potom věcí těch odborníků.
Datum: 22.04.2021Autor: DAVID7001Hodnocení: 0 0
-
-
-
Re: Přední pohon svislou hřídelí.
Neumím posoudit, nakolik je stávající stav nedobrý, protože jsem nikdy nezkusil nic jiného a nepřipadá mi, že bych o něco zásadního přicházel. Takže se můžu jenom těšit na výsledek toho experimentu s klasickým kolem s asymetrickou vidlicí.
Pro zajímavost: znáš Kervelo? Kolo se šlapkami uprostřed předního kola. Má středovou převodovku (Pinion) a celé šlapání zatáčí spolu s předním kolem. Asi nejradikálnější zkrácení převodové soustavy, jaká se dá vymyslet, při zachování slušného rozsahu převodů.Datum: 22.04.2021Autor: NightRiderHodnocení: +2 0
-
Re: Přední pohon svislou hřídelí.
S tím by šlo udělat elegantně jednoduše předělávatelný jednostopý stroj na tříkolku. Ten pinion by za to stál. Jen by se vidle prohodila za nápravu. Něco takového bez pinionu ale dělá nějaká garážová značka zoot nebo nějak tak, nenašel jsem to zrovna.
Datum: 22.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
To se mi líbí! Aneb jak udělat fwd lowracer s velkým předním kolem.
Je to např. tu: https://newatlas.com/kervelo-low-racer...Datum: 22.04.2021Autor: PavelŠHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Tak jsem to dohledal, něco jako tady,
https://www.zoxbikes.com/zox-rikscha/
kdy měníš za úchytem sícu různé zadní nápravy napojováním různě tvarovaných hranatých profilů. Ale nutnost variabilní brzdné soustavy pro 2 i 3 kola zároveň by vyžadovalo rozhodně víc zkušeností oproti mým žádným. Takový stroj bych i užil, bo by se mi vešel do sklepa. Kromě údržby toho pinionu v tom kervelo řešení, je pak zbytek na úrovni koloběžky.
Ale pro kervelo šlapání v ose by to asi musela být nízká stavba alá lowracer i přes 26". Flevo a jím ispirované "klasické" stavby s tím kervelem taky vypadají dobře. Ve výsledku asi silniční stroj s terénními ambicemi na úrovni europolňačky. Pokud by se zvládla výzva té přední letmé vidle s kotoučovou brzdou, rozumným závlekem a pro mne s komplikovanějším umístěním hlávka, tak zbytek rámu je na úrovni šešroubování jeklů. I když někomu to jezdí s hlávkem tvaru pantu vrat :-D
Když si to tak promítám hlavou, po přečtení celkem odborných komentářů, tak to zde nastíněné konstrukční cvičení už beru jako návrh zajímavého pozornost upoutávajícího technologického demonstrátoru pro fajnšmekry vyžadujícího celkem kulaťoučký grant. Co musím ale uznat, tak dotáhnout tento návrh do nějaké použitelné vizualizace vyžaduje zaujetí zběhlého konstruktéra :-D
NightRider: Prosím Tě a s jak těžkým nákladem vzadu na "korbě" Tvé tříkolky je ten přední pohon použitelný?Datum: 22.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Jestli myslíš mého pythona, tak tam mi dřív dojde síla a převody, než začne hrabat. Přední kolo nese 64 kg, to je pravděpodobně víc než zadní kolo od favorita (o víkendu ho schválně zvážím). Náklad vzadu nemá na zatížení předku žádný vliv. Největší zkušební náklad byl něco přes metrák (na rovince), v praxi celkem běžně vozím kolem 50 kg a to je naprosto bez problémů.
Jestli myslíš systém Kervelo, tak tam to bude s trakcí horší, protože je přední kolo o půl metru dál vepředu. Zvětšovat rozvor, aby se na něj dostalo víc váhy, můžeš jenom tak dlouho, dokud se s tím vejdeš do zatáček. Na silnicích to asi bude v pohodě, ale náklaďák do hor nebo do terénu z toho neuděláš.Datum: 23.04.2021Autor: NightRiderHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Takže ten favorit: 40 kg vepředu, 46 vzadu (46:54 %).
Datum: 25.04.2021Autor: NightRiderHodnocení: +1 0
-
-
Re: Přední pohon svislou hřídelí.
https://www.google.com/imgres?imgurl=http%3A%2F...
https://www.google.com/imgres?imgurl=http%3A%2F...Datum: 22.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
https://www.google.com/imgres?imgurl=http%3A%2F...
https://newatlas.com/kervelo-front-wheel-drive...Datum: 22.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
https://patineto.smugmug.com/Bicycles/AWDFWD...
Datum: 22.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Tak jsem se zamyslel nad výrobou té klece a chtěl bych se zeptat na možnost výroby doma, bo požadovaná klec zrovna dostupná není. Prosím Vás šla by využít nějaká zkruž z duralové trubky patřičného průměru síly třeba 10mm a vysoustružit ty výstupky pro niple s tím, že by se čelo prostě přivařilo a dál upravilo?
Datum: 23.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Takto jak to je, je dělané z kulatiny a obrábění je kombinace frézky a soustruhu, resp soustruh a dokončit ručně.
Jako kusový cnc díl je to materiál (1000) + obrábění (programy+ hodiny stroje) tak 10-15tis.
(hodně hrubý odhad- řešíme spíš frézované díly, soustruženeé minimálně)
možná by to šlo udělat z 2 kusů ("trubka"+ "čelo")
ale jejich spojení to chce spočítat.
osobně bych to svařené nedělal, ale je to o tom, že nemám možnost (ani zadat) kvalitní svařelní alu slitin+ tepelnou úpravu. Datum: 23.04.2021Autor: cibiHodnocení: 0 0
Datum: 23.04.2021Autor: cibiHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Potom by tedy rámový set i s klecí mohl být kolem 20k, to zas není špatná situace. Pokud bych tu klec měl v ruce, tak stavím "doma" tříkolku a procítěně bych požádal doma o doplacení na pinion :-D Tedy jako plán by to bylo hezké.
Datum: 23.04.2021Autor: Arnošt905Hodnocení: 0 0
-
-
-
Re: Přední pohon svislou hřídelí.
FWD s řetězem nemá žádný vážnější problém, ale vpodstatě je vhodný pouze na závodní neodpružené lehokola na velmi dobrý povrch - turisťák z toho taky uděláš, ale bude čerpat z lowracer koncepce malé čelní plochy a tím pádem slušné aerodynamiky.
Malých nevýhod je celá řada, a někdy jsou dost podstatné a bránící většímu rozšíření lehokol.
Semilowracery (který kreslíš) mají aerodynamiku na úrovni silničního kola, pokud jsou dobře navrženy - stejné účinnosti není lehké dosáhnout - většinou musí jezdit na vysokotlaké přední gumě, a převod musí být efektivní aspoň na 95% - kolikrát vadí i Rohloff.
Pokud bys to myslel fakt vážně, musel bys vyvinout celoodpružený stroj s tímto pohonem, výbornou ergonomií a geometrií, kryty kol s blatníky, výbornou servisovatelností, nezáludností, nastavitelností.
Další oříšek by byla aerodynamika nastavitelná na rozsah postav, a jednoduše vyměnitelná sedla apod.
Celoodpružené FWD vyvinul co vím pořádně pouze jeden anglán, který vyrobil víc zajímavých lehokol a závodních velomobilů.
A i kdyby se ti podařilo takový stroj vyvinout a vyrobit - při každé ztrátě adheze poletíš ze zatáčky na svém boku - bota, koleno, kyčel, loket, rameno - na lowraceru lehneš z 30cm, já to zažil v 15km/h při stoupání do mírného kopce, a následné ztrátě adheze.
Lehnout v 50km/h z vysokého stroje, tak se ještě natlučeš - znamená to jezdit s chrániči, a to už je jednodušší si pořídit velomobil, než se půl hodiny do toho navlíkat.
Pády na lehokole obecně jsou lahůdka, ale někdy je to prašť jako uhoď - na uprightu zas často hrozí salto vpřed.Datum: 22.04.2021Autor: singleHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Když to salto dotočíš, tak dopadneš na zadek a nic se nestane. No mně se to podařilo dotočit jen jednou. Chce to trénovat :(
Datum: 22.04.2021Autor: BrahmaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
"dopadneš na zadek a nic se nestane"
Vyzkoušeno opakovaně bez salta na inlinech a nic moc, dlouho se to hojí! Já teda zpravidla nespadl přímo na zadek, ale na bok. Už cca v 15 km/h na asfalt to znamená díru v kraťasech a mokvající odřený flek na kůži... :-(Datum: 22.04.2021Autor: JrrHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Když letíš volně kotoulem přes řídítka, tak odřená prdel je výhra. Já jednou dopadl blbě zádama naplocho na asfalt a ulomil si příčný výběžek obratle. Ono je to méně hrozné, než to zní, ale stejně jsem měl hodně nahnáno.
Datum: 22.04.2021Autor: BrahmaHodnocení: 0 0
-
-
-
Re: Přední pohon svislou hřídelí.
Mohl bys uvést jméno toho anglána a radši i fotografie jeho výrobků?
Děkuji, AVDatum: 22.04.2021Autor: AVHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Geoff Bird:
http://www1.bhpc.org.uk/Constructors/Bird/t7...
http://www.bhpc.org.uk/Constructors/geoff-bird...
http://www.bhpc.org.uk/Constructors/Bird/zen...
http://forum.bhpc.org.uk/full-suspension-fwd...Datum: 22.04.2021Autor: singleHodnocení: +1 0
-
-
Re: Přední pohon svislou hřídelí.
Odpružené FWD se dá udělat velmi snadno ve stylu Flevoracera, zdvih je prakticky neomezený, klidně 15cm :-) . Akorát to nebude úplně low (z důvodu geometrie řízení), ale semilow už lze. A hlavní výhoda: člověk má za jízdy volné ruce :-)
Datum: 22.04.2021Autor: PavelŠHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
No jo no., kéž bychom viděli víc životaschopných projektů v reálu postavených a skvěle fungujících...
Datum: 22.04.2021Autor: singleHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
nojo... Flevo jsem si kdysi pořídil na zkoušku právě proto, že jsem plánoval stavbu něčeho podobného celoodpruženého (nejspíš b2b tandem) a chtěl jsem si vyzkoušet, jestli se na tom dá jezdit. V poslední době o tom zase trochu uvažuju. Jenže neumím vařit. Existuje někdo (nejlépe v okolí Brna), kdo je schopen a ochoten udělat jakýkoliv rám na zakázku podle nákresu? Nejlépe i nějak správně nadimenzovat tloušťky materiálu a tak. Klidně z jeklů :-)
Datum: 22.04.2021Autor: PavelŠHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
40km od Brna, mám se zeptat? Železo tedy jen.
Datum: 23.04.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ano, za kontakt bych byl rád. Zatím to není úplně urgentní (resp. je, ale představa se teprve zpřesňuje), ale hodil by se mi nějaký ležatý tandem. Možná Twin, ale možná taky něco jiného a to už by byla nejspíš originální stavba. Musím si ujasnit jestli vůbec b2b (kdyby ne, tak asi ten twin) a v případě, že ano, tak jestli není "flevo" řízení na turistické použití a ještě navíc na těžkém stroji s dlouhým rozvorem příliš divočina (ale líbí se mi na tom právě to bezproblémové odpružení). Hodil by se tam nějaký pákový mechanismus řízení rukama pro pomalé rychlosti:-)
Omlouvám se autorovi diskuse za odbíhání od tématu...Datum: 23.04.2021Autor: PavelŠHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Je to otec kolegy, který pracoval v patřičném údobí v místním Velamosu :-D Jde půjčit i TiG u nás v práci. Tzn. bastl v kruhu nejbližších za dobré vztahy jako zájmový projekt :-D Musel bych to domluvit, ale nabídku mám potvrzenou na moje historické snahy o oceláč. V místní autodílně mi taky něco svářeli.
Datum: 23.04.2021Autor: Arnošt905Hodnocení: 0 0
-
-
-
-
Re: Přední pohon svislou hřídelí.
... i když mě napadlo, že velký zdvih může při propružení hýbat se závlekem. Ale nakreslil jsem si to a při vhodné poloze čepu přední kyvné vidlice by to mohlo být zanedbatelné. Takže by to mělo jít.
Jinak samozřejmě nevýhoda flevo koncepce je to, že v pomalých rychlostech (pokud chce člověk nějak kličkovat) se to blbě řídí (a vůbec chvíli trvá, než se na tom člověk naučí jezdit). Ve větších rychlostech už je to ale stejné, jako jakékoliv jiné lehokolo.Datum: 22.04.2021Autor: PavelŠHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Pavle, samozřejmě nevím kde chceš mít čep přední kyvky, ale pokud jej dáš jednoduše do osy řetězu, je už tak vysoko, že kyvka bude pod úhlem a výsledek je neakceptovatelný pogo efekt.
Chce to asi použit tahovou kladku o něco níž v místě čepu, a tím pádem první řetězová linka vyjde krátká a nezbyde místo na řazení přesmykem - takže jednotác bych řekl.
Btw kup si svářečku, je v tom hromada svobody ;)
Jig neptřebuješ, stačí deska a vařit do poslední chvíle 2D.Datum: 24.04.2021Autor: singleHodnocení: +1 -1
-
-
-
-
Re: Přední pohon svislou hřídelí.
Před časem jsem přislíbil, že princip posunuté osy řízení ověřím na obyčejném kole. Tady to je.
https://www.youtube.com/watch?v=TWMCKNTi9r0
Jízda rovně je vcelku bez problémů, jen s lehkou labilitou podle druhu podkladu. Zatáčení vpravo (na stranu vyosení) je naprosto v pohodě, stejné jako u normálního kola. Zatáčení vlevo je vyhovující do určitého natočení řidítek (na videu pořád v pohodě), pak má tendenci si přidávat. Myslím, že jednostranný tlumič řízení by pomohl.
Zkoušel jsem to jen při nevelkých rychlostech, protože přední kolo mám přichycené letmo jen přes původní osku M10.Datum: 12.10.2021Autor: JaVrHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
paráda! Není nad praktickou zkoušku. Teď (když už je jak) to vyzkoušet nejen na téměř dokonale hladkém asfaltu, ale třeba i na polňačce s výmoly, asfaltce s výtluky atd., tam bych očekával největší problém. A zkusit i ostřejší oblouky na takovém povrchu. A celou škálu rychlostí 5..50 km/h. Jestli to bude stále OK (a ustojí to třeba i krátkodobé puštění řídítek), tak je to na dobré cestě! :-)
Datum: 12.10.2021Autor: PavelŠHodnocení: +2 0
-
Kloub řízení
Né že bych byl znalý v oboru a vyádřím se jen ke kloubu řízení a nikoliv k přenosu síly a točivého momentu šlapání.
Přijde podle mi podle videa a popisu, že přesunutí kloubu řízení do osy rámu a předního kola, vrátí stabilitu řízení na kvalitu běžných konstrukcí. Datum: 12.10.2021Autor: Arnošt905Hodnocení: 0 0
Datum: 12.10.2021Autor: Arnošt905Hodnocení: 0 0
-
Re: Kloub řízení
To máš pravdu, ale také odstraní 2 podstatné výhody této konstrukce, k vůli kterým jsem to celé dělal. A to je jednoduchý svislý hřídel (v Tvém případě by se musel 2x zalamovat) a kompenzace hnacího momentu (v Tvém případě bys ho musel chytat řiditkama).
Datum: 12.10.2021Autor: JaVrHodnocení: 0 0
-
Re: Kloub řízení
Jezdil jsem na kole s lehce vyhlou zadní vidlicí, takže jsem furt něco kompenzoval při řízení tohoto lehce nestabilního kola. Je to hodně namáhavé na neustálé soustředění a zbytečnou fyzickou námahu to obnáší také.
Nejsem si teda tahle jist kladným výsledkem Tvého snažení ohledně pravidelného ježdění třeba do práce apod., pokud to obnáší výrazné zhoršení jízdních vlastností podle mého. Neříkám, že zvyknout se na to nedá.
Hmotnost kola evidentně nemáš na seznamu priorit, tak navrhuju promyslet i variantu pohonu zadního kola, pokud bude neodpružená zadní vidle, dokud nezačne stavba jako taková. Bo materiálový prostor asi máš.Datum: 12.10.2021Autor: Arnošt905Hodnocení: 0 0
-
-
-
Re: Přední pohon svislou hřídelí.
Nejsem si jistý, jak moc a o čem je ta tvoje zkouška vypovídající, oproti konstrukci prezentované výše je tady jinak snad uplně všechno. Z hlediska řízení například závlek kola, z hlediska rovnováhy to nemá ani cenu rozebírat...
Každopádně se zkus projet alespoň po dlažebkách, že na hladkém asfaltu to není tak strašný není zas tak překvapivé.Datum: 12.10.2021Autor: SodomaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Naopak, princip řízení je tady přesně takový, jako u navrhovaného lehokola. Osa řízení je posunuta o 100 mm mimo podélnou rovinu celého kola a přední kolo je uchycené letmo, aby se vrátilo do roviny celého kola.
Datum: 13.10.2021Autor: JaVrHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
troufám si tvrdit že nikoliv.
Z videa není uplně čitelné, jaký je úhel hlavové trubky, skoro bych řekl že ten NEMÁ původní úhel, takže ten jsi, řekněme, postavil víc na kolmo, nicméně offset ti na vidlici zůstal (prohnutí těch šavlí na konci nichž drží osa kola).
Tedy pokud jsi vidlici "nepřelomil" v krku a neohnul jí celou tak, aby osa hlavové trubky procházela osou kola.
Pokud ne, NENÍ to totéž jako na Tvém návrhu.
Pokud je osa řízení postavená kolmo k zemi a kolo se i s offsetem přesto vrací do přímého směru, máš někde něco dost "špatně" (míněno jinak než na tvém designu v úvodu).Datum: 13.10.2021Autor: SodomaHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Ano, s tím offsetem máš pravdu. Osa kola je o prohnutí vidlice posunuta dopředu. Ale to je jediná odchylka od návrhu, která asi nehraje velkou roli. Na stabilitu má v tomto případě hlavní vliv sklon hlavy řízení. Hlava je téměř kolmá, mírně spodkem dopředu , aby se eliminovaly jizdní odpory předního kola.
Datum: 14.10.2021Autor: JaVrHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
představ si to jako kolečko na nákupním vozíku ze samošky, princip stejný.
Pokud to kolečko dokážeš tlačit před sebou (s tím offsetem) a nemá tendence ti to uhýbat na strany, ba dokonce má tendence se to stabilizovat v přímém směru, to vše se svislou osou řízení, není a nemůže to být jako na Tvém návrhu.
Díky offsetu tam máš záporný závlek a to zanedbávám rameno vzniklé mezi bodem dotyku kola se zemí a osou řízení.
Se záporným závlekem se dá jezdit (NightRiderovo pythoni), ale znamená to kouzlit s dalšíma věcma abys to ustabilizoval (hmotnost jezdce, respektive pozice jeho těžiště vzhledem ke geometrii řízení).
Proto říkám, projdi si to ještě jednou, nejlépe s nějakou chytrou literaturou po ruce. Je velmi pravděpodobné, že sis do toho pokusu vnesl něco, s čím jsi nepočítal a výsledky jsou tak přinejmenším zavádějící...Datum: 14.10.2021Autor: SodomaHodnocení: +5 0
-
Re: Přední pohon svislou hřídelí.
Ono je to bohužel ještě složitěšjí, závlek může pomoct, ale není nutný pro stabilitu kola. Viděl jsem videa z jedné holandské univerzity (někde by to šlo najít, přednáška na téma "bicycle stability). Experimentovali se setrvačnýma momentama kol, závlekem a rozložením hmotností. Nakonec dokázali postavit kolo, které nemělo žádné gyroskopické efekty, žádný kladný závlek a přesto když ho roztlačili po podlaze, samo drželo vzpřímeně dokud neztratilo rychlost. Trik byl poloha těžiště hmot spojených s rámem versus poloha těžiště hmot spojených s otočnou vidlicí a úhel záklonu vidlice. Pokud vzájemné poměry těchto věcí jsou "správně", dokáží stabilizovat lehce negativní závlek.
No a tohle všechno je na rovném povrchu a bez vlivu pohonu. Jakmile některé z kol umí nejen klást odpor, ale i táhnut dopředu, a navíc nerovný povrch náhodně mění bod dotyku se zemí směr působení sil v tom bodě, tak se do toho přidá další hromada proměnných.
Tím pádem simulovat lehokolo s předním pohonem offsettnutou hřídelí a offsetnutou osou řízení mimo stopu kola tím, že klasickému kolu offsetnu přední nepoháněné kolo do boku, to prostě nemůže dát relevantní výsledky. Pokud ignorujeme pohon, tak ty dvě situace mají společné jen to, že osa řízení neprotíná stopu předního kola. A že na něčem takovém obecně jde nějak jezdit už prokázalo víc lidí na víc kolech. Sám jsem na takovém kdysi seděl. Mike Burrows je stavěl, leho i nákladní. On teda aspoň měl těžiště všeho nad spojnicí dotyků kol se zemí při rámu svisle, což ten pokus na videu ani vizualizace lehokola nemá, ale i tak to pocitově zatáčelo trochu nesymetricky, na jednu stranu jinak než na druhou. Ale s aktivním řízením jezdcem to bylo stabilní. V tomhle ten pokus na videu neobjevuje nic nového. A nijak neodpovídá na otázku, jestli lehokolo s tou převodovkou a zmršeným říením vpředu bude dostatečně dobře řiditelné na to, aby na něm šlo jezdit. Může se rozkmitávat do nepojízdnosti, může jen být protivné na řízení a může být fajn.Datum: 15.10.2021Autor: JirkaHodnocení: +3 0
-
Re: Přední pohon svislou hřídelí.
Tak samozřejmě že to JE složitější, ale narvat do příspěvku celou učebnici prostě nejde :-D
Ale měl bych technický dotaz: jak ta univerzida postavila kolo co "nemělo žádné gyroskopické efekty"? Gyroskop snad uděláš z každýho (kotouče) kterej roztočíš, ne?Datum: 15.10.2021Autor: SodomaHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
Hádal bych, že poblíž každého kola umístili druhé skoro stejně velké kolo točící se stejnou rychlostí opačným směrem?
Datum: 15.10.2021Autor: JrrHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
"Why bicycles do not fall" od TU Delft :
https://www.youtube.com/watch?v=2Y4mbT3ozcA
(to je ten dokument o stabilním kole bez závleku a gyroskopického efektu)Datum: 19.10.2021Autor: NightRiderHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Já jsem našel tohle, je tam zmíněných pár odkazů a pěknej je i ten poslední komentář pod článkem :-)
https://www.motorkari.cz/profil/?uid=170263&...Datum: 19.10.2021Autor: SodomaHodnocení: 0 0
-
-
-
-
Re: Přední pohon svislou hřídelí.
K tomu závleku.
O závleku lze mluvit tehdy, pokud je osa řízení i kolo v jedné podélné rovině. V tomto smyslu u mé konstrukce žádný takový závlek není, protože osa řízení je o 100 mm posunuta doprava, kdežto kolo zůstává v podélné rovině celého kola. Tím je bod styku kola s vozovkou o 100 mm vlevo od průsečíku osy řízení s vozovkou. Takže to řízení je stabilizováno pouze při výchylce řízení doprava a to na rameni 100 mm. Při výchylce řízení doleva, vzniklé síly mezi vozovkpu a pláštěm dál zvyšují výchylku řízení a proto je v tomto směru nestabilní. OFFset sice posouvá bod styku dopředu, ale pořád je vlevo od průsečíku osy řízení, takže to kolo bude vždy na jednu stranu nestabilní. Proto říkám, že by jednostranný tlumič mohl pomct.Datum: 15.10.2021Autor: JaVrHodnocení: 0 0
-
Re: Přední pohon svislou hřídelí.
Někteří lidé si prostě musí všechno vyzkoušet.
Zhodnocením jejich přínosu může být jejich schopnost mimochodem přijít na něco využitelného, nebo taky jejich schopnost vytvořit si zázemí pro danou aktivitu.Datum: 16.10.2021Autor: singleHodnocení: +1 0
-
Re: Přední pohon svislou hřídelí.
O švédském spisovateli Augustu Strindbergovi se dočteme, že byl přistižen, jak
vyfukuje kouř z dýmky do umyvadla s vodou, zkoušeje, zda touto cestou nevznikne
zlato. A my si říkáme: Hle, jak podivínský nápad se zrodil v tak geniálním mozku!
Ale není správnější říci: Nebyl to Strindberg, kdo experimentálně zjistil, že vypouštěním tabákového dýmu do vody zlato nevznikne? Někdo to totiž vyzkoušet musel.
Někdo musel slepou uličku lidského poznání ohledat a ohlásit světu: Tudy ne, přátelé!Datum: 16.10.2021Autor: SodomaHodnocení: +7 0
-
-
-
-
-
-
-
-







Hledám: Horolezecká túra v Maroku, v pohoří Atlas

Hledám: Horsky prusmyk lezení na kole v Maroku
PR články:
Co se děje:
Vyzkoušejte:
Perfektní funkční oblečení pro vaše sportovní aktivity, od značky Moira.



článků a fotografií je dovoleno pouze se svolením NaKole, o.s. a s uvedením zdroje.
NaKole.cz se právě projíždí
Atlas Mountain Race – marockými horami na kole
Poprvé jsem v zimě letěl s kolem do teplých krajin. Účastnil jsem se bikepacking závodu Atlas Mountain Race v…
Rodinný bikepacking končí: Z Nízkých Tater přes Muránskou planinu až do Dobšiné
Po noci strávené na horské chatě jsme se probudili a zjistili, že jedno z kol na mém zamčeném bicyklu bylo…